Sistemes electrònics d'estabilització (ESP, AHS, DSC, PSM, VDC, VSC)
 Aquests sistemes garanteixen que el vehicle es comporti de manera segura en situacions crítiques, especialment quan es tracta de virar. Durant el moviment, els sistemes avaluen diversos indicadors, com ara la velocitat o la rotació del volant, i en cas de risc de derrapatge, els sistemes poden tornar el cotxe a la seva direcció original frenant rodes individuals. En vehicles més cars, els sistemes de control d’estabilitat també inclouen un xassís actiu que s’adapta a la superfície i l’estil de conducció del conductor i contribueix encara més a la seguretat de la conducció. La majoria dels cotxes utilitzen un sistema de marcatge als seus vehicles. ESP (Mercedes-Benz, Skoda, VW, Peugeot i altres). Amb marcatge AHS (Sistema de processament actiu) utilitzat per Chevrolet als seus vehicles, DSC (Control dinàmic de seguretat) BMW, PSM (Sistema de gestió d’estabilitat Porsche), V CC (Control de la dinàmica del vehicle) està instal·lat als cotxes Subaru, VSC (Control d’estabilitat del vehicle) també s’instal·la als vehicles Subaru i Lexus.
Aquests sistemes garanteixen que el vehicle es comporti de manera segura en situacions crítiques, especialment quan es tracta de virar. Durant el moviment, els sistemes avaluen diversos indicadors, com ara la velocitat o la rotació del volant, i en cas de risc de derrapatge, els sistemes poden tornar el cotxe a la seva direcció original frenant rodes individuals. En vehicles més cars, els sistemes de control d’estabilitat també inclouen un xassís actiu que s’adapta a la superfície i l’estil de conducció del conductor i contribueix encara més a la seguretat de la conducció. La majoria dels cotxes utilitzen un sistema de marcatge als seus vehicles. ESP (Mercedes-Benz, Skoda, VW, Peugeot i altres). Amb marcatge AHS (Sistema de processament actiu) utilitzat per Chevrolet als seus vehicles, DSC (Control dinàmic de seguretat) BMW, PSM (Sistema de gestió d’estabilitat Porsche), V CC (Control de la dinàmica del vehicle) està instal·lat als cotxes Subaru, VSC (Control d’estabilitat del vehicle) també s’instal·la als vehicles Subaru i Lexus.
L’abreviatura ESP prové de l’anglès Programa d’estabilitat electrònica i significa programa d’estabilització electrònica. Pel mateix nom, és evident que es tracta d’un representant dels assistents electrònics de conductors en termes d’estabilitat de conducció. El descobriment i la posterior implementació de l’ESP van suposar un avenç en la indústria de l’automòbil. Una vegada va passar una situació similar amb la introducció de l'ABS. L’ESP ajuda el conductor inexpert i amb molta experiència a fer front a algunes de les situacions crítiques que poden sorgir durant la conducció. Hi ha diversos sensors al cotxe que registren les dades de conducció actuals. Aquestes dades es comparen mitjançant la unitat de control amb les dades calculades per al mode de conducció correcte. Quan es detecta una diferència, l’ESP s’activa automàticament i estabilitza el vehicle. ESP utilitza altres sistemes de xassís electrònics per a la seva funció. Entre els treballadors electrònics més importants s’inclouen el sistema de frens antiblocatge ABS, sistemes antilliscants (ASR, TCS i altres) i consells sobre el funcionament dels sensors ESP necessaris.
El sistema va ser desenvolupat per enginyers de Bosch i Mercedes. El primer cotxe equipat amb ESP va ser el coupé de luxe S 1995 (C 600) del març del 140. Uns mesos després, el sistema també es va dirigir a la clàssica S-Class (W 140) i SL Roadster (R 129). El preu d’aquest sistema era tan elevat que al principi el sistema només era estàndard en combinació amb el motor de dotze cilindres 6,0 V12 de gamma alta, per als altres motors ESP només s’oferia per un fort recàrrec. L’autèntic boom de l’ESP es va deure a coses aparentment petites i, en certa manera, a la coincidència. El 1997, els periodistes suecs van realitzar una prova d’estabilitat per a la novetat d’aleshores, que era el Mercedes A. Per a la gran sorpresa de tots els presents, Mercedes A no va poder fer front a l’anomenada prova dels alces. Això va suposar el començament d’un negoci que va obligar els fabricants a suspendre la producció per poc temps. Els esforços dels tècnics i dissenyadors de la planta d’automòbils de Stuttgart per trobar la solució adequada al problema s’han coronat amb èxit. Basat en nombroses proves, l'ESP es va convertir en una part estàndard de Mercedes A. Això, al seu torn, va significar un augment en la producció d'aquest sistema de les desenes de milers a centenars de milers esperades, i es podrien aconseguir preus més assequibles. L’ESP ha obert el camí a l’ús en vehicles mitjans i petits. El naixement de l’ESP va suposar una autèntica revolució en el camp de la conducció segura i actualment està relativament estès no només gràcies a Mercedes-Benz. L’existència d’ESP, que està en desenvolupament i actualment és el seu major fabricant, va contribuir molt a l’existència d’ESP.
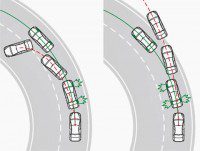
En la majoria de sistemes electrònics, el cervell és la unitat de control electrònic, i aquest no és el cas de l'ESP. La tasca de la unitat de control és comparar els valors reals dels sensors amb els valors calculats durant la conducció. La direcció requerida ve determinada per l'angle de gir i la velocitat de gir de les rodes. Les condicions reals de conducció es calculen a partir de l'acceleració lateral i la rotació del vehicle al voltant del seu eix vertical. Si es detecta una desviació dels valors calculats, s'activa el procés d'estabilització. El funcionament de l'ESP regula el parell motor i afecta el sistema de frenada d'una o més rodes, eliminant així el moviment no desitjat del vehicle. L'ESP pot corregir el subviratge i el sobreviratge en viratge. El subviratge del vehicle es corregeix frenant la roda interior posterior. El sobreviratge es corregeix frenant la roda exterior davantera. Quan es frena una roda determinada, es generen forces de frenada sobre aquesta roda durant l'estabilització. Segons una simple llei de la física, aquestes forces de frenada creen un parell al voltant de l'eix vertical del vehicle. El parell resultant sempre contraresta els moviments no desitjats i, per tant, retorna el vehicle en la direcció desitjada a l'hora de girar. També fa girar el cotxe en la direcció correcta quan no gira. Un exemple de funcionament de l'ESP són les corbes ràpides quan l'eix davanter surt ràpidament de la cantonada. L'ESP redueix primer el parell motor. Si aquesta acció no és suficient, es frena la roda interior posterior. El procés d'estabilització continua fins que es redueix la tendència al patinatge.
L'ESP es basa en una unitat de control comuna a l'ABS i altres sistemes electrònics com el distribuïdor de força de fre EBV / EBD, el regulador de parell del motor (MSR) i els sistemes antilliscants (EDS, ASR i TCS). La unitat de control processa dades 143 vegades per segon, és a dir, cada 7 mil·lisegons, que és gairebé 30 vegades més ràpida que la d’un ésser humà. L'ESP requereix una sèrie de sensors per funcionar, com ara:
- sensor de detecció de fre (informa la unitat de control el conductor del qual està frenant),
- sensors de velocitat de roda individuals,
- sensor d'angle del volant (determina la direcció de desplaçament requerida),
- sensor d’acceleració lateral (registra la magnitud de les forces laterals actuants, com ara la força centrífuga a la corba),
- un sensor de rotació del vehicle al voltant de l'eix vertical (per avaluar la rotació del vehicle al voltant de l'eix vertical i determinar l'estat de moviment actual),
- sensor de pressió de fre (determina la pressió actual del sistema de fre, a partir del qual es poden calcular les forces de frenada i, per tant, les forces longitudinals que actuen sobre el vehicle),
- sensor d’acceleració longitudinal (només per a vehicles de tracció a les quatre rodes).
A més, el sistema de frenada requereix un dispositiu de pressió addicional que aplica pressió quan el conductor no està frenant. La unitat hidràulica distribueix la pressió del fre a les rodes de fre. L'interruptor de la llum de fre està dissenyat per encendre els llums de fre si el conductor no frena quan el sistema ESP està engegat. De vegades, l’ESP es pot desactivar amb un botó al tauler, cosa que és convenient, per exemple, quan es circula amb cadenes de neu. L’apagat o l’encesa del sistema s’indica mitjançant un indicador encès al tauler d’instruments.
El sistema ESP us permet superar una mica els límits de les lleis de la física i augmentar així la seguretat activa. Si tots els cotxes estiguessin equipats amb ESP, es podrien evitar aproximadament una desena part dels accidents. El sistema comprova constantment l'estabilitat si no està apagat. Així, el conductor té una major sensació de seguretat, sobretot a les carreteres glaçades i nevades. Atès que l’ESP corregeix la direcció de desplaçament en la direcció desitjada i compensa les desviacions causades per la derrapada, redueix significativament el risc d’accidents en situacions crítiques. Tanmateix, cal remarcar amb un sol alè que fins i tot l’ESP més modern no salvarà a un conductor temerari que no segueixi les lleis de la física.
Com que ESP és una marca comercial de BOSCH i Mercedes, altres fabricants utilitzen el sistema Bosch i el nom ESP, o bé han desenvolupat el seu propi sistema i utilitzen un acrònim (propi) diferent.
Acura–Honda: Control d'estabilitat del vehicle (VSA)
Alfa Romeo: control dinàmic del vehicle (VDC)
Audi: Programa d'Estabilitat Electrònica (ESP)
Bentley: Programa d'Estabilitat Electrònica (ESP)
BMW: Dynamic Traction Control (DSC)
Bugatti: Programa d'Estabilitat Electrònica (ESP)
Versió: StabiliTrak
Cadillac: StabiliTrak i direcció davantera activa (AFS)
Chery Car: Programa d’estabilitat electrònica
Chevrolet: StabiliTrak; Maneig actiu (Lin Corvette)
Chrysler: Programa d'Estabilitat Electrònica (ESP)
Citroën: Programa d'Estabilitat Electrònica (ESP)
Dodge: Programa d'Estabilitat Electrònica (ESP)
Daimler: Programa d'Estabilitat Electrònica (ESP)
Fiat: Programa d'Estabilitat Electrònica (ESP) i Control Dinàmic del Vehicle (VDC)
Ferrari: control establert (CST)
Ford: AdvanceTrac amb control d’estabilitat de rotació (RSC), dinàmica de vehicles interactius (IVD), programa d’estabilitat electrònic (ESP) i control d’estabilitat dinàmica (DSC)
General Motors: StabiliTrak
Holden: Programa d'Estabilitat Electrònica (ESP)
Hyundai: Programa d'Estabilitat Electrònica (ESP), Control d'Estabilitat Electrònic (ESC), Assistència a l'Estabilitat del Vehicle (VSA)
Infiniti: control dinàmic de vehicles (VDC)
Jaguar: Control d’estabilitat dinàmica (DSC)
Jeep: Programa d'Estabilitat Electrònica (ESP)
Kia: control electrònic d'estabilitat (ESC) i programa electrònic d'estabilitat (ESP)
Lamborghini: Programa d'Estabilitat Electrònica (ESP)
Land Rover: control dinàmic d’estabilitat (DSC)
Lexus: gestió integrada de dinàmica de vehicles (VDIM) i control d’estabilitat de vehicles (VSC)
Lincoln: AdvanceTrac
Maserati: Programa d’estabilitat Maserati (MSP)
Mazda: Dynamic Stability Control (DSC), control de tracció dinàmic
Mercedes-Benz: Programa d'Estabilitat Electrònica (ESP)
Mercuri: AdvanceTrac
MINI: Control dinàmic d’estabilitat
Mitsubishi: control actiu d'estabilitat i control de tracció MULTI-MODE un control actiu d'estabilitat (ASC)
Nissan: control dinàmic del vehicle (VDC)
Oldsmobile: sistema de control de precisió (PCS)
Opel: Programa d'Estabilitat Electrònica (ESP)
Peugeot: Programa d'Estabilitat Electrònica (ESP)
Pontiak: Stabili Trak
Porsche: Porsche Stability Control (PSM)
Protó: programa d’estabilització electrònica
Renault: Programa d'Estabilitat Electrònica (ESP)
Grup Rover: control dinàmic d'estabilitat (DSC)
Saab: Programa d'Estabilitat Electrònica (ESP)
Saturn: StabiliTrak
Scania: Programa d'Estabilitat Electrònica (ESP)
SEAT: Programa d’Estabilitat Electrònica (ESP)
Škoda: Programa d'Estabilitat Electrònica (ESP)
Smart: Programa d’estabilitat electrònica (ESP)
Subaru: Control de la dinàmica del vehicle (VDC)
Suzuki: Programa d'Estabilitat Electrònica (ESP)
Toyota: gestió integrada de dinàmica de vehicles (VDIM) i control d’estabilitat de vehicles (VSC)
Vauxhall: Programa d'Estabilitat Electrònica (ESP)
Volvo: estabilitat dinàmica i control de tracció (DSTC)
Volkswagen: Programa d'Estabilitat Electrònica (ESP)
